琉球大学工学部 知能情報コース 沖縄高専 メディア情報工学科 沖縄高専 機械システム工学科 株式会社マグナデザインネット



水中音響通信で水中ドローンを無線操作する!
琉球大学工学部と沖縄高専は、那覇市マグナデザインネット社と協力し、スマフォの電波と同じOFDM(オーエフディーエム)変調方式用いて、深海での海洋資源開発、養殖業の自動化、マリンレジャーの安全向上を目的とした、超音波による海中双方向通信システムを開発し、海中ロボットの無線コントロールへの等への応用を目指しています。
① 応用分野
本システムのターゲット分野は
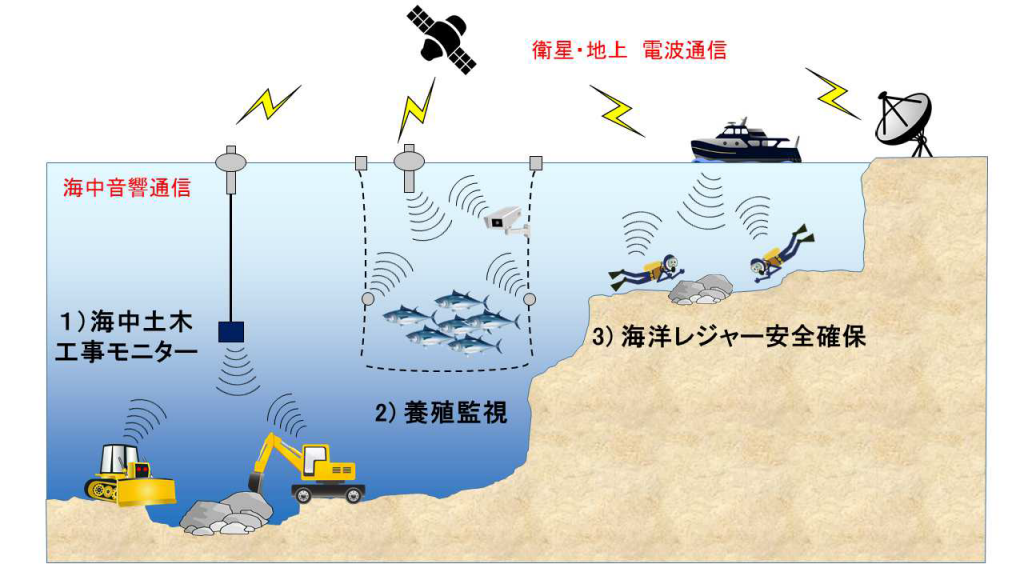
1)海中土木工事モニター
2)養殖場の監視
3)マリンレジャー安全確保などです。
② 海中の通信エリア
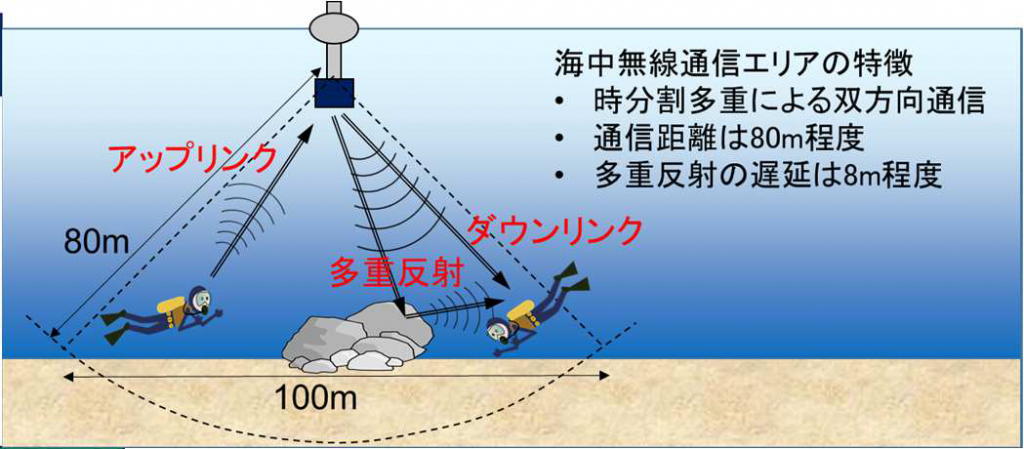
基地局を中心として、100m程度の小規模無線通信エリアを構築します。
エリア内では、時分割で、基地局からユーザ(ダウンリンク)通信、ユーザから基地局(アップリンク)通信をサポートしています。
③ なぜ超音波で?
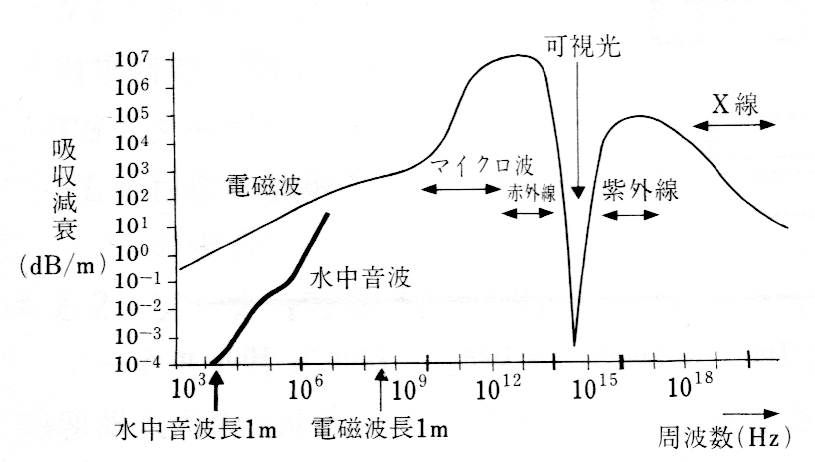
右に、周波数に対する海中での電磁波(光)と音波の吸収減衰率を示します。海中では、電磁波中の可視光だけは減衰率は低く、遠距離通信が可能で、音波も周波数
が100KHz以下では減衰率が低く通信向きです。光は汚濁による透明度低下で、減衰率上昇の問題と、指向性の制御が困難と考え、音波での実現を目指しています。
右図:電磁波と音波の海中での吸収減衰率の周波数特性
(海洋音響の基礎と応用(成山堂書店、2004))
④ OFDMって何?
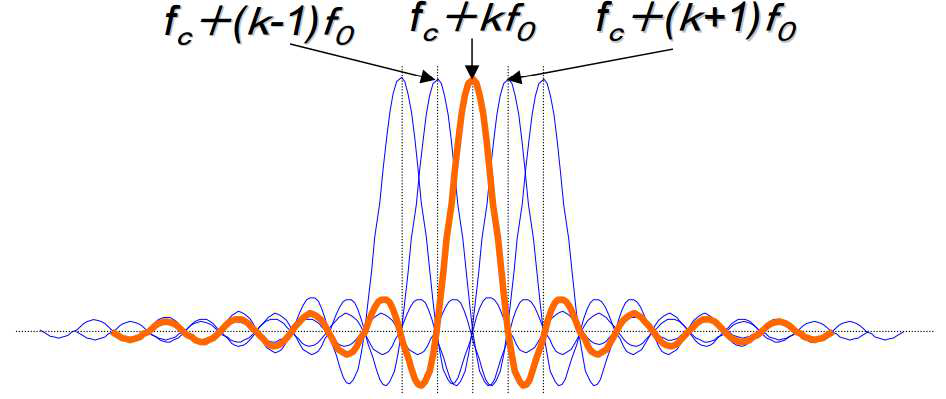
右図は伝送速度向上のために、周波数方向
に多数の波(サブキャリア)を用いるOFDM方式の
スペクトラムを示した図です。本システムは人間が
聞えない16KHz以上の超音波を用いています。
OFDMスペクトラム
(デジタル無線通信の基礎からOFDM入門まで
琉球大学工学部情報工学科和田知久)
⑤ 応用目指しての水中ロボット(ドローン)の無線操作実験
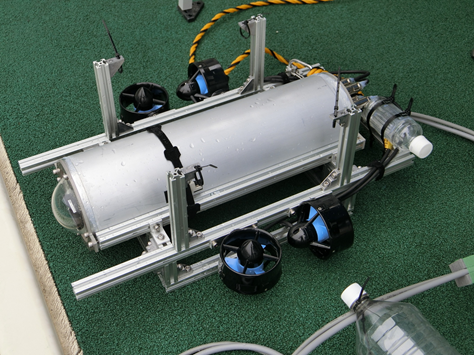
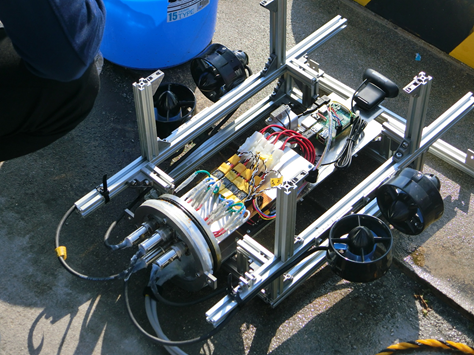
沖縄高専が開発した水中小型ロボットの写真を以下に示します。音による海中無線通信で、ロボットの動作の制御と海中での写真撮影データの伝送デモをするために現在取り組んでいます。左が水中小型ロボットの写真で、右はカバーをはずした写真です。ラズベリーパイと呼ばれるARMプロセッサを搭載したシングルボードコンピューターをロボット制御に用いています。今年度は、通信装置が大きくロボットには内蔵せず、実験を実施しています。
⑥ 海でのロボット(ドローン)コントロール実験中
以下は嘉手納沖で実施したロボット制御実験の様子です。
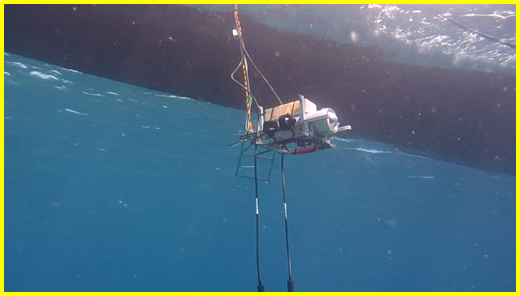

左のオレンジの浮きの下に基地局用通信装置を設置しています。この基地局からの音による制御信号により小型水中ロボットを制御する実験を始めています。
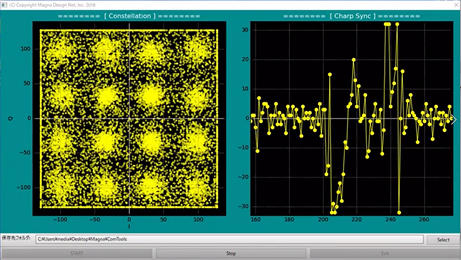
下に、16QAMの通信を示す写真を示します。
海中小エリアTDD-OFDM通信システム
TDD-OFDM本研究課題は、平成28-30年度 総務省戦略的情報通信研究開発推進事業(SCOPE)地域ICT 振興型研究開発採択課題により開発がサポートされ、令和2年度 総務省戦略的情報通信研究開発推進事業(SCOPE)社会展開志向型研究開発により、製品化に向けた実用的研究開発に取り組んでいます。